

FOOMA JAPAN 2018出展ライン
MARUYASU 2018

クリップベヤをスパイラル状に設置することで、省スペースの昇降を可能にしたSライン。 画像処理ユニットとロボットを組み合わせ、ワークの可変移載を実現したEライン。 究極の小型コンベヤを具現化したMラインの3タイプをご提案します。
サンプルライン全景
Sライン(スパイラルアップライン)全体
弊社標準品に新規提案機種などを組み合せ、省スペースで昇降搬送を行います。 また、高能力の振分け・頭出し整列・合流を行い、生産現場の更なる進化を提案します。
Eライン(エクスチェンジロボットライン)垂直多関節ロボット&コンベヤハンド
『垂直多関節ロボット』は、コンベヤハンドで搬送物をストックコンベヤより取出し、ループラインへ入替を行います。通常ロボットハンドは、吸着・挟む・掴むの動作ですが、今回ベルトコンベヤをロボットハンドとして搭載していますので、搬送物を複数個まとめてベルトコンベヤ上に載せることが可能となっています。
Mライン(ミニチュアライン)全体
生産現場でありがちな水平搬送・傾斜搬送、また移載や分岐・合流・表裏反転を弊社標準製品の1/2スケールで製作したコンパクトなデモンストレーション用ラインです。 また、食品検査で幅広く使用されているLED付きコンベヤも4色に変化するコンベヤ型の看板としてみました。
Sライン詳細(スパイラルアップライン)
弊社標準製品に新規提案機種などを組み合わせ、省スペースで昇降搬送を行います。
また、高能力の振分け・頭出し整列・合流を行い、生産現場の更なる進化を提案します。
搬送の流れ
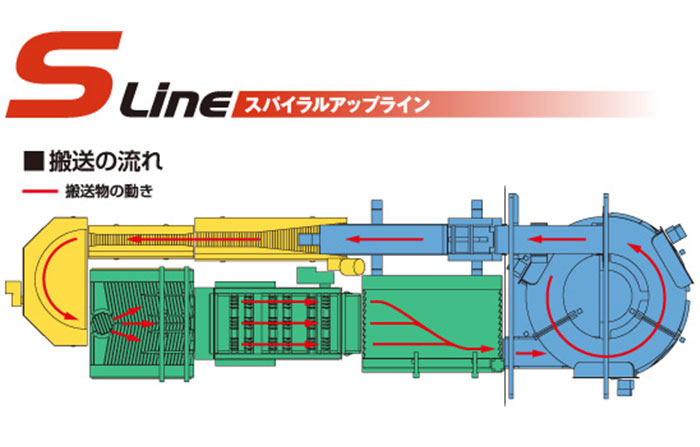
昇降エリア
1列で流れて来る搬送物を、新規提案の『スパイラルカーブコンベヤ』で「らせん状」に2周半の上り傾斜搬送を行います。 弊社オリジナルのクリップ駆動を使用し、90°タイプ2台と、120°タイプ6台で揚程1250mmを省スペース(≒1500mm)で行なっています。 下り傾斜については、同じく新規提案の『下り傾斜フックコンベヤ』で行ないます。 弊社オリジナルのアンチバック方式フックを使用し、投入タイミング制御が不要で連続搬送が可能、且つ省スペースで配置が可能です。
主要構成機種
MFB(面一ベルトコンベヤ)・GBCS(スパイラルカーブコンベヤ)・下り傾斜フックコンベヤ
フードエリア
「昇降エリア」から搬送物を受取り、速度差により搬送能力の調整を行い、その後180°カーブコンベヤで搬送物を搬送します。 コンベヤフレーム等はステンレス製で、弊社標準機種の一例です。 『GS18』はマグネットによる「非接触駆動」で、クリーンなローラコンベヤです。 『GFBC180°』は、水/粉/油に強い弊社オリジナルのクリップ駆動を採用したカーブベルトコンベヤです。 いずれも食品搬送の環境に対応したコンベヤです。
主要構成機種
GS18・GFBC180°
振分・合流エリア
「フードエリア」から1列で流れて来る搬送物を、3方向に分岐させた後横1列になる様に頭出しを流れの中で行います。その後搬送物を流れの中で合流させて縦1列にさせます。 『G2LS-H』はマグネット駆動式の弊社オリジナルの振分け用コンベヤです。 『HPA』は3列バラバラのタイミングで流れてきた搬送物を流れの中で頭出し整列が可能なコンベヤです。弊社オリジナルのアンチバック式フックを使用し、電気制御ではなく機械構造で行います。 『SGA』はマグネット駆動式のローラコンベヤで、横1列から縦1列への合流を行います。また、搬送物の側面はガイドではなくベルトコンベヤなので、傷等がつきにくいと同時に安定した姿勢で搬送物を排出させることができます。 搬送ラインの分岐及び合流方法の一例として提案いたします。
主要構成機種
G2LS-H・HPA・SGA
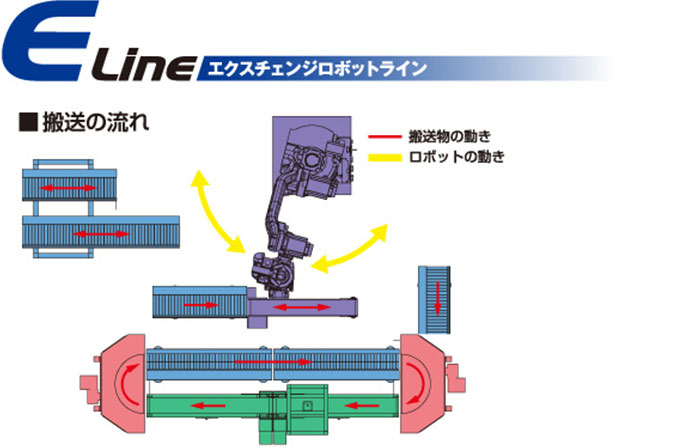
Eライン詳細(エクスチェンジロボットライン)
主に弊社標準製品、垂直多関節ロボット、画像処理ユニットなどを組み合わせ、コンベヤ型の棚にストックしている搬送物をループ状のコンベヤラインへ出し入れを行います。 新しいタイプの自動倉庫やストックライン、切り替えラインとして提案します。
搬送の流れ
GS18
マグネット駆動方式を採用した、弊社標準のローラコンベヤです(透明樹脂フレームは今回のみの特別仕様)。ただし、今回搬送物のストック及び受取り・受渡し用に配置された『GS18』は、駆動用モータが無く、垂直多関節ロボットのハンドとして搭載されているベルトコンベヤから駆動力をマグネットで介して伝達し、駆動力を得る構造となっています。
主要構成機種
GS18
垂直多関節ロボット&コンベヤハンド
『垂直多関節ロボット』は、コンベヤハンドで搬送物をストックコンベヤより取出し、ループラインへ入替を行います。通常のロボットハンドは、吸着・挟む・掴むの動作ですが、今回はベルトコンベヤをロボットハンドとして搭載していますので、搬送物を複数個まとめてベルトコンベヤ上に載せる事が可能となっています。 また、コンベヤハンドの駆動力をマグネットで介して、ストック及び受取り・受渡し用コンベヤを駆動させます。
主要構成機種
垂直多関節ロボット・コンベヤハンド
GBC
水/粉/油に強く、ベルトをガッチリと挟み込み力強くベルトを廻す、弊社オリジナルのクリップ駆動を採用したカーブベルトコンベヤです。 スチールフレーム製の『GBC』と、ステンレス製フレームの『GFBC』があり、ベルト幅200mm~1400mm、角度も45° 60° 90° 180°とバリエーションも豊富です。
主要構成機種
GBC90°・GBC180°
ループライン
GBC&GM18H&マグネット駆動スイングコンベヤ&画像処理ユニット
『垂直多関節ロボット』により、受取り用コンベヤへ供給された搬送物はカーブコンベヤで搬送され、ループ状に形成されたコンベヤラインで搬送されます。搬送物の切替えは、新規提案機種のマグネット駆動スイングコンベヤで上下ラインを切替えます。 この『マグネット駆動スイングコンベヤ』はモータからの駆動力をチェーンやタイミングベルト、またギヤ等を使用せず、マグネットの磁力でコンベヤを駆動させています。 そうすることで、スイング側(可動側)を軽量化する事が可能となり、スイング動作の高速化が実現しました。 また、搬送物の種類は複数あり、画像処理ユニットで判別し、種類ごとに分けて搬送物ストックコンベヤへ収納します。
主要構成機種
マグネット駆動スイングコンベヤ・画像処理ユニット・GM18H
Mライン詳細(ミニチュアライン)
生産現場でありがちな水平搬送・傾斜搬送、また移載や分岐・合流・表裏反転を弊社標準製品の1/2スケールで製作したコンパクトなデモンストレーション用ラインです。
搬送の流れ
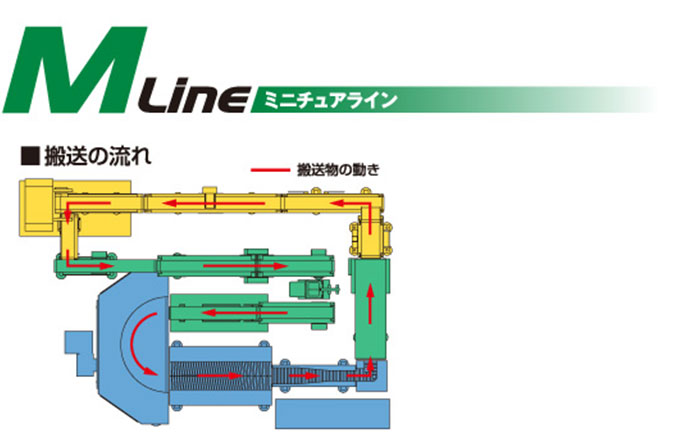
フードベヤシリーズエリア
弊社食品搬送専用シリーズ、フードベヤシリーズの主要機種で構成しています。流れて来る搬送物をシュートで受取り、上り傾斜搬送後、直角乗り移り装置で搬送物を下流側コンベヤへ払い出します。 ベルト表面にローラが触れることなく衛生的でシンプルな構造の2プーリタイプコンベヤ。 テールローラ径を小さく、ドライブプーリを大きくして大きな駆動力を与えるセンタドライブタイプコンベヤ。 また、ベルトの着脱を工具無しで行える清掃性・メンテナンス性に優れたタイプのコンベヤ。 食の安全・安心には欠かす事の出来ないシリーズです。
主要構成機種
SL・TBC200・FB2C・FB2H・直角乗移り装置・FSD
ミニシリーズエリア
フードベヤシリーズエリアから払い出された搬送物を受取り、下り傾斜搬送後、ピック&プレース装置(吸着式移載装置)でダブルピック(2個移載)で高速移載を行います。 その後シリンダ駆動式の水平振分けコンベヤで交互振分けを行い、一旦レスベヤシリーズエリアへ受渡しますが、その後『MTV』により搬送物の表裏反転を流れの中で行います。 ミニシリーズは一般環境用の汎用性の高いコンベヤです。 フレームは高精度アルミ押出し材を使用し、ローラは鉄製を採用していますが、簡易食品対応として食品対応ベルト、ベルト表面に接するローラをステンレス製に変更するなどフレキシブルに対応することも可能です。(水洗い不可)
主要構成機種
MFB・L型フィーダMMX0・ピック&プレース装置・MMX0・振分けMFB・MTV
レスベヤシリーズエリア
『GBC180°』で搬送物を2列交互に受取り、180°カーブ搬送を行います。その後、『GA7』で2列で受取った搬送物をコンベヤの特性のみで中央へ1列に整列させ、下流側コンベヤに受け渡します。 いずれも7mmの小径ローラ、ローラピッチも8mmと超ナローピッチローラコンベヤで、小物搬送に適しています。 その後直角搬送が可能なコーナ搬送用コンベヤ『GC7』を通り、表裏反転を行った後、フードベヤシリーズエリアへ戻します。 レスベヤシリーズは、磁力の吸引と反発を利用して搬送用ローラを回転させます。これにより、従来のベルト式に比べ、極めて効率的且つロスが少なく、クリーン、低騒音、高速対応が可能な駆動方式です。
主要構成機種
GBC180°・GA7・G7・GC7
LED付きコンベヤ
食品検査に幅広く使われているLED付きコンベヤも、4色に変化するコンベヤ型の看板にしてみました。 従来機と同じ光量の5,000ルクスですが、極薄帆布のベルトで透過率96%となり、搬送面上での照度はUPしています。
